|
|
|
RN-Motor - Intelligente Schrittmotorsteuerung
per I2C-Bus oder RS232
|
|
Speziell
für Roboterkonstuktionen konzipiert!
 Durch einfache RS232-Befehle (z.B. Print Befehl)
oder I2C-Befehle lassen sich zwei Motoren völlig unabhängig
und exakt steuern. Eine eingebaute PWM-Stromregelung
(ähnlich dem L297 Prinzip) sorgt dafür das auch
Schrittmotor kraftvoll arbeiten und zudem bipolare Motoren
beliebiger Nennspannung ca. 1 bis 22V angesteuert
werden können. Der Strom wird einfach per Befehl dem
Board mitgeteilt, alles andere macht das Board selbstständig.
Genaue Fahrstrecke kann durch Schritteabruf berechnet
werden. Durch einfache RS232-Befehle (z.B. Print Befehl)
oder I2C-Befehle lassen sich zwei Motoren völlig unabhängig
und exakt steuern. Eine eingebaute PWM-Stromregelung
(ähnlich dem L297 Prinzip) sorgt dafür das auch
Schrittmotor kraftvoll arbeiten und zudem bipolare Motoren
beliebiger Nennspannung ca. 1 bis 22V angesteuert
werden können. Der Strom wird einfach per Befehl dem
Board mitgeteilt, alles andere macht das Board selbstständig.
Genaue Fahrstrecke kann durch Schritteabruf berechnet
werden.
Bequemer
kann man Motoren kaum ansteuern, ein- bzw. zwei Ports
genügen.
Steuersoftware, Beispiele für PC oder RN-Control,
RNBFRA-Board , C-Control werden beim Bausatz mitgeliefert.
 
Die wichtigsten Eigenschaften:
- Deutlich höheres Drehmoment (Motorkraft) durch
automatische PWM-Stromregelung
- Voll- und Halbschrittmodus (per I2C wählbar)
- Maximal zulässiger Strangstrom kann durch einfachen
Befehl von einem Controller oder PC zwischen 0 und
2A festgelegt werden. Kein rumschrauben mehr an
Potis!
- Es können nahezu alle bipolaren Schrittmotoren
beliebiger Nennspannung 1V bis zur Versorgungsspannung
(7 bis 22V) angesteuert werden. Beispiel: Sie können
auch einfach einen 1.9V Motor an ein Board mit 9V
oder 12V anschließen, der Motor wird nicht überlastet
da der max. Strom eingestellt wird. RN-Motor arbeitet
etwas ähnlich wie die L297/L298 Schaltung, bietet
jedoch mehr High Level-Funktionen
- Durch die Verwendung eines programmierten Controllers
und mehrer integrierter Schaltkreise benötigt das
ganze Board nur wenig Bauteile. Dies reduziert Kosten
und erleichtert den Aufbau.
- Ein mitgelieferter Steuerprogramm erlaubt die
Ansteuerung der Schrittmotoren bequem per Mausklick.
Durch die Möglichkeit unterschiedliche Ströme und
Geschwindigkeiten einzustellen, lassen sich Schrittmotoren
auch optimal austesten.
- Übermittelt wird nur der Befehl der beschreibt
wieviel Schritte ein bestimmter Motor in welcher
Geschwindigkeit und Drehrichtung erfolgen soll.
Um die Generierung und das zählen der Schritte kümmert
sich das Board völlig automatisch. Dadurch wird
der steuernde Controller oder PC erheblich entlastet
- 255 exakte Geschwindigkeitstufen möglich
- Drehrichtung und max Strombedarf jederzeit änderbar
- Endlosfunktion, welche Schrittmotoren solange
dreht bis ein Stopp Befehl kommt
- Schrittezähler, die ausgeführten Schritte der
Motoren können jederzeit abgerufen werden, somit
läßt sich exakt die Länge der gefahrenen Strecke
berechnen
- Bei ausgeschalteten Motoren benötigt das Board
weniger als 40mA, das ist deutlich weniger als bei
üblichen L297/L298 Schaltungen.
- Board läßt sich auch per RS232 Befehl in Sleep-Mode
versetzen um Stromaufnahme weiter zu verringern
(auf ca. 20mA).
- LED signalisiert wenn die Betriebsspannung nicht
ausreicht um den Schrittmotor-Nennstrom (also maximale
mögliche Leistung) bei der gewählten Geschwindigkeit
zu erreichen. Eine recht nützliche Analysefunktion.
- ISP-Programmieranschluß -Atmel Programmierer
können das Board mit einem eigenen Betriebsystem
versehen. Dies ist aber nicht notwendig!
- Zur Steuerung des Board´s würde im Notfall ein
RS232 TX PORT reichen. Bei der RN-Control könnte
fast jeder Port dafür verwendet werden wenn in Basic
programmiert wird. Ideal sind jedoch zwei Ports
um auch die Rückmeldungen des Motorboards auswerten
zu können.
- Ansteuerung über beliebige Controller z.B. RN-Control,
RNBFRA, C-Control oder PC
- Erlaubte Versorgungsspannung 7V bis 22 V
- Sehr kompakt, nur halbes Europaformat nach Roboternetz-Norm
(ca. 100x75mm). Dadurch mit anderen Boards nach
Roboternetz-Standard huckepack verschraubbar.
- Deutsche Doku mit Ansteuer Beispielen
für RN-Control und C-Control und PC-Steuerprogramm

Steuersoftware für PC auf CDRom enthalten
zum
Vergrößern anklicken
Download Anleitung
Download PC-Steuerprogramm
Download
RN-Control-Steuerprogramm
Bausatz, Fertigmodul oder Platine
erhältlich 

 Passende
Schrittmotoren hier Passende
Schrittmotoren hier
|
|
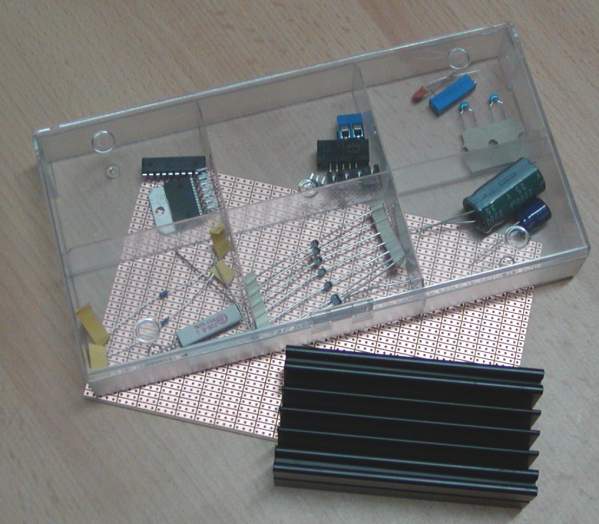
Bauteilesatz Schrittmotoransteuerung
mit L297/L298
|
|
Dies Schaltung ist leicht aufzubauen und bietet dennoch
eine wirklich proffessionelle Ansteuerung von Schrittmotoren.
Da die Stromstärke von ca. 0,2A bis 2 A über einen Spindeltrimmer
fest eingestellt wird, können nahezu alle gängigen bipolaren
Schrittmotoren angesteuert werden, acuh wenn diese kleinere
Nennspannungen aufweisen.
Die Optimale Leistung wird erzielt indem die Schaltung
selbstständig ein PWM-Signal geniert, abhängig von der
jeweiligen Stromaufnahme. Die Microcontroller braucht
sich um diese DInge nicht zu kümmern und wird dadurch
optimal entlastet. Für die Ansteuerung benötigt man
somit nur drei Leitungen:
- einen Port zum einschalten der Motoren
- einen Port für die Drehrichtung
- einen Port für den Schrittimpuls (ein kurzer
Impuls bewegt den Motor genau um einen Schritt)
Die Versorgungsspannung beträgt 5V! Die Motorspannung
kann ca. zwischen 5V und 30V liegen! Je höher die Motorspannung
je mehr Drehmoment wird erzielt - also um so kraftvoller
ist der Motor. Die Nennspannung des Motors kann wie
bereits gesagt durchaus wesentlich niedriger (sogar
nur 2V) betragen. Dies macht die Schaltung so universell
einsatzbar!
Diese Schaltung wird auch auf dem RoboterNetz-Board RNBFRA genutzt,
dort sogar zweifach!
Zum Lieferumfang gehören alle notwendigen Teile:
- 1x L298 Motortreiber
- 1x L297 Schrittmotoransteuerung
- 8x Dioden BYV27/200
- 1x 2200 uF/35V (R=7,5mm, D=16mm)
- 1x 220 uF/35V (R=5mm, D=10mm)
- 2x 100n (R=5mm L=6mm,B=3mm)
- 2x 0,5 Ohm 4-5 Watt (Raster 27mm)
- 1x 22k (R=7,5mm L=6mm,B=2,5mm)
- 1x 3,3n (R=5mm L=6mm,B=3mm)
- 1x Schraubklemmen 4er (R=5,12) oder RIA- RIA-Wannenbuchse
- 1x Schraubklemmen 2 polig (R=5,12) oder RIA-Wannenbuchse
- 1x Wannenbuchse 2x5 gerade für Ansteuerung
- 1x Lochrasterplatine Euroformat 3er Reihen
- 1x Jumper Stiftleiste 1x3 für Voll- und Halbschritt
Auswahl
- 2x Jumper Stiftleiste 1x2 zum messen der Referenzspannung
(Strombegrenzung)
- 1x Kühlkörper (wie Abbildung oder ähnlich)
- 1x 6,2k (R=7,5mm L=6mm,B=2,5mm)
- 1x 10k Spindeltrimmer (L=14mm,B=4,5mm)
- 1x CD-ROM mit Datenblättern und Schaltplan

zum
Vergrößern anklicken

Passende
Schrittmotoren hier
|
|
Professionelle Getriebemotoransteuerung
für 2 Motoren
|
|
Für Roboter-Bastler die Getriebemotoren bevorzugen
bietet sich diese Schaltung an. Sie ist ebenfalls sehr
leicht aufzubauen und bietet dennoch
eine wirklich genügend Leistungsreserven für alle üblichen
Motoren.
Da die Stromstärke von ca. 0,2A bis 2 A.
Für diese Leistung sorgt der bekannte L298 Schaltkreis!
Zum Ansteuern der Schaltung sind 6 Ports notwendig:
- einen Port zum einschalten des linken Motors
(wahlweise normaler Port oder PWM-Port für Geschwindigkeitsregelung)
- zwei Ports dessen Kombinations die Drehrichtung
des linken Motors festlegen
- einen Port zum einschalten des rechten Motors
(wahlweise normaler Port oder PWM-Port für Geschwindigkeitsregelung)
- zwei Ports dessen Kombinations die Drehrichtung
des rechten Motors festlegen
Die Versorgungsspannung beträgt 5V! Die Motorspannung
kann ca. zwischen 5V und 30V liegen!Diese Schaltung wird auch auf dem RoboterNetz-Board RNBFRA für
Getriebemotoren genutzt.
Zum Lieferumfang gehören alle notwendigen Teile:
- 1x L298 Motortreiber
- 8x Dioden BYV27/200
- 1x 2200 uF/35V (R=7,5mm, D=16mm)
- 1x 220 uF/35V (R=5mm, D=10mm)
- 2x 100n (R=5mm L=6mm,B=3mm)
- 1x Schraubklemmen 4er (R=5,12) oder RIA- RIA-Wannenbuchse
- 1x Schraubklemmen 2 polig (R=5,12) oder RIA-Wannenbuchse
- 1x Wannenbuchse 2x5 gerade für Ansteuerung
- 1x Lochrasterplatine Euroformat 3er Reihen
- Kühlkörper (wie Abbildung oder ähnlich)
- CD-ROM mit Datenblättern und Schaltplan

zum
Vergrößern anklicken


|
Eine ähnlich Ansteuerung für Getriebemotoren
findet sich in der Bestelliste.

|














